
Environmental & Conservation
Tracking Wildlife With a Custom-built Aerial Data Acquisition Platform
Building a customized, cost-effective, ultra-light aircraft for surveying, filming and tracking animals in wild and remote environments was a project recently profiled in a BBC documentary. Undertaken by Professor Alan Wilson, head of a research department at the Royal Veterinary College, University of London, and his team to study cheetahs and their prey in the vast savannahs of southern Africa.

Disruption-free Data Acquisition
Alan Wilson, BSc BVMS PhD MRCVS, heads the Structure and Motion Laboratory (www.rvc.ac.uk/sml), a university research department at the Royal Veterinary College, University of London, which is investigating how animals move and how they interact with their physical environment. The research covers a broad range, from how herds of animals move and interact or the dynamics of flocking flight, to how muscles perform in individual species, including how movement is controlled and the limits to performance.
A study was launched to visualize how cheetahs interacted with their terrain. With the hope of revealing new insights into how the animals move, range, hunt or evade capture and interact with the natural environment.
Image: Professor Alan Wilson poses with cheetahs and the Structure and Motion Lab research aircraft while filming a segment for Big Cats with the BBC – Stuart Dunn 2018 ©

A First Attempt
It was the first-ever attempt at such a detailed investigation of animals’ locomotion and ability to cover their terrain, without disturbing their habitat or their natural behavior. Given the vast scale and varied terrain of the study landscape, along with the need to minimize contact with the animals, it was decided that aerial data collection would be the ideal and safest solution.
Imaging from a UAV platform was rejected because this approach has been shown to cause disturbance to wildlife while offering insufficient payload and range to cover such large survey areas. Also, there could be regulatory issues with operating UAVs in national reserve areas. Another option for this project, satellite imaging, would have provided insufficient resolution and at a very high cost.
Given the remote location of this project, it was necessary to develop a solution for aerial data collection, photography, and survey. A customized airplane equipped with a state-of-the-art aerial imaging camera and related technology was used to capture the action of cheetahs.
Image: Cheetas are fitted with movement tracking collars containing a GPS and an IMU (Inertial Measurement Unit) consisting of a 3D accelerometer, 3D gyro and 3D magnetometer – A Wilson, RVC 2018 ©
The Phase One Industrial survey camera delivered excellent high-resolution photos, which produced spectacular aerial imagery and integrated easily with our LIDAR scans.
3D Imaging Used to Follow Wildlife Movement
Detailed three-dimensional images of the ground were collected, showing vegetation height and density, areas of water, animal tracks, and terrain features such as dips and hollows, termite mounds, mudflats, and features such as fences. These enabled the research team to determine preferred hunting and ranging habitat, information useful also for conservation and land management planning.
The individual study animals were fitted with movement tracking collars containing a GPS and an IMU (Inertial Measurement Unit) consisting of a 3D accelerometer, 3D gyro, and 3D magnetometer. This equipment enabled the team to map and analyze the routes, maneuvers, and speeds of hunts, and how the predator or prey may have utilized land features to its advantage.

Improve Data Collection with High-Resolution Imagery
Once the study was completed, the research team used Pix4D photogrammetry software to process the high quality, high-resolution images into a three-dimensional point cloud describing the positions of tracks and obstacles on the routes predators used to chase prey. Using the Quick Terrain Modeler software package, the point cloud was merged with the point cloud from the LiDAR scan to produce highly accurate 3D terrain maps showing tracks, shade-giving vegetation, landscape features and watering points.
The camera’s very large high-resolution sensor meant that the resulting images provided not only high resolution to pick out fine detail in the landscape, but also substantial dynamic range, to differentiate subtle landscape features by color and tone, even in this arid environment. These results produced the detailed terrain and track visualizations that the research team found essential for this project.
Professor Wilson and his team demonstrated that it is actually the cheetah’s agility – the ability to slow down, weave, and change direction – that makes them such powerful hunters.
Image: Pix4D photogrammetry software is used to process the high quality, high-resolution images into a 3D point cloud describing the positions of tracks and obstacles – Royal Veterinary College 2018 ©

Aerial Imaging Solution
The aircraft was modified by installing viewing panels in the floor and designing a waterjet cut aluminum frame mounted in the rear (passenger) location. The Phase One Industrial camera was integrated with the aircraft’s Novatel dual frequency GPS/INS system, operating with a Honeywell IMU, enabling each photograph to be stamped with precise aircraft position, altitude, and roll/pitch/yaw. The camera could be controlled from the aircraft’s custom computer system, allowing single-pilot start/stop and monitoring of the system, either with the Riegl LIDAR or under independent control by Professor Wilson’s own custom software for photo-only surveys.
System reliability was critically important, as once the aircraft with its integrated data collection technology suite was deployed in a remote area of Botswana, maintenance or repair would be extremely difficult.
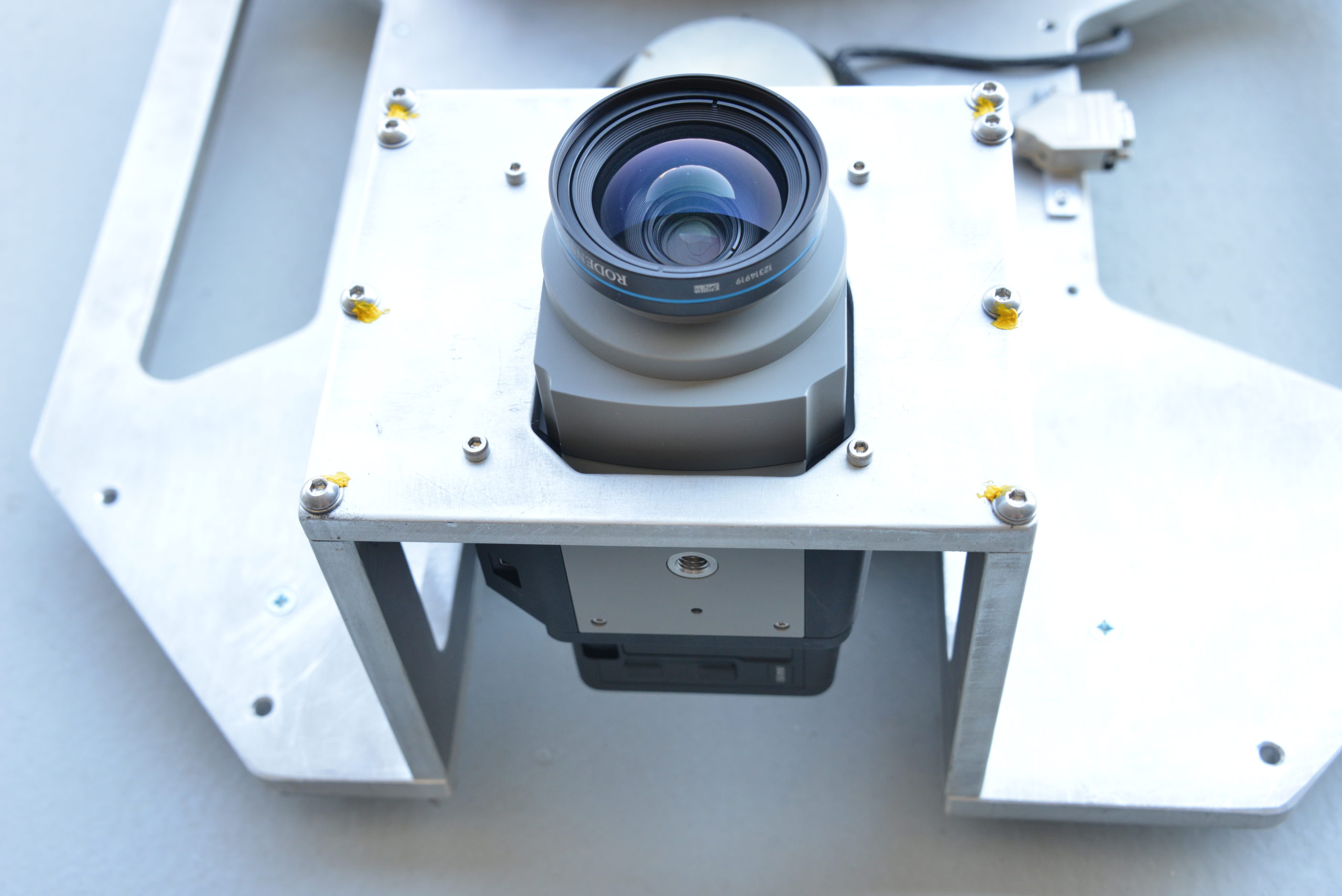
Image: Phase One Industrial’s aerial camera is mounted in its aluminum frame, which fits the camera into a viewing panel in the floor of the aircraft.

Contact a Phase One Expert
If you would like to learn more about our Payloads for Drones, our experts are eager to help! Contact Us.

Geospatial
The PAS Pana: a 48,800-pixel camera innovated with our customer Surdex

Geospatial
Rebuilding after Hawaii’s wildfire with engineering-grade surveying

Geospatial
Revolutionizing Slovenian urban planning: Phase One’s PAS 880i redefines reality mapping

Geospatial
Imaging solutions combined with AI and 5G – A new approach and promising to assess forest health and detect and monitor wildfires

Geospatial
Phase One Cameras combined with light, fixed-wing aircraft deliver highly efficient LiDAR and mapping missions

Geospatial
Capturing Glastonbury Festival

Geospatial
Breaking barriers to offshore wind energy development

Geospatial
Using aerial oblique images combined with close range UAV (uncrewed aerial vehicles) based data

Geospatial
A change in the future of high-risk, critical asset inspections: fast, effective and safe aerial powerline inspection in a fraction of time and with real cost savings

Geospatial
Using drone technology for Flare Stack Inspection: Getting the smallest details from a safe distance

Geospatial
The Experiences of EyeFly with Phase One iXM

Geospatial
Dam Fine Data: Sub-millimeter-resolution UAV Dam Surveys by Orthodrone

Geospatial
Trimble Inpho – High class photogrammetry with aerial imagery from PAS 280

Geospatial
MapSoft – Multi-sensor Aerial System Improves Urban Development

Geospatial
NV5 Geospatial – Capturing Precise Details, with Four Phase One Cameras Integrated into Helicopter-based CLASS

Press Release
Carbonix, RIEGL, Phase One announce first fixed-wing VTOL integration of long-range dual sensor system

Geospatial Blog
Insights and future trends at Geo Week 2024

Press Release
Phase One Appoints HALG | Hindustan Assistant & Logistic Group as Official Technical Partner in India to Enhance Local Support and Engagement

Press Release
Phase One Introduces PAS Pana at InterGeo 2023: The Most Effective Wide Area Camera for Aerial Mapping

Press Release
Phase One announces New Calibration Lab and Geospatial Center of Excellence in Denver